**Introduction to the Principle of Underwater Drones**
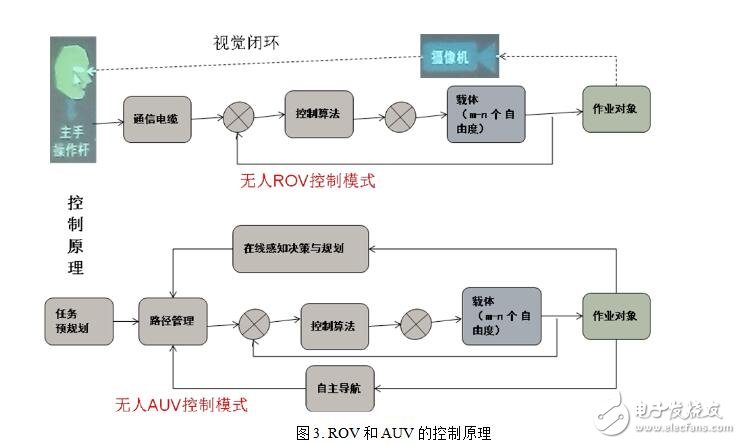
An underwater drone is a remotely operated or autonomous device designed for tasks beneath the water surface. It is equipped with visual and sensory systems, allowing it to perform various operations such as inspection, exploration, and salvage. These drones are typically controlled from the surface or operate independently using advanced algorithms. Since the 1970s, significant advancements have been made in underwater robotics, leading to the development of machines capable of functioning at different depths and performing complex tasks. Applications include oil and gas exploration, seabed mapping, pipeline inspections, marine farming, and dam monitoring.



Heat Sink,Al Stamping Type,High Performance Cooling
Wenzhou Hesheng Electronic Co., Ltd. , https://www.heshengelec.com