Abstract: This paper mainly analyzes and studies the wireless remote control robots in the robot DOTA competition in the robot competition of the five provinces in North China in 2014, and introduces the design of two infrared wireless remote control attack robots and a fully autonomous defensive robot communication and hitting device. And implementation, so that it can complete a series of attacks, obstructing the other party and other complex tasks according to the operator's requirements. The 80C51 single-chip microcomputer and the WFT06X-A 2.4GHz six-channel proportional remote control device of Shenzhen Tiandifei Technology Development Co., Ltd. were used to control the robot, which successfully completed the control of the robot and optimized its performance to achieve the expected goal.
This article refers to the address: http://
Keywords: DOTA confrontation strategy robot
0 Preface
In the 2014 North China Robotics Competition, the robot DOTA competition, which was based on remote control and independent, was set up for the first time. It was reported by major media in the country. Soon after, the National Robot Competition Committee slightly ruled the game in the DOTA competition. It was revised and renamed ROBOTAC to be included in the 2015 National Robot Competition.
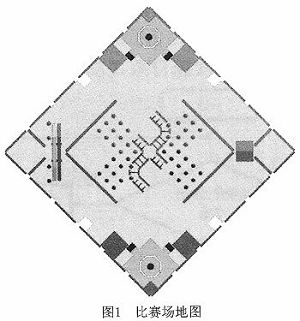
The robot DOTA match is a attack and defense match between the red and blue robots on the specified venue (Fig. 1). During the game, multiple robots on both sides have to overcome obstacles, attack and attack the other fortress, and the one with the highest score wins.
As the saying goes, "Everything is difficult at the beginning." Since the robot DOTA competition is the first project to be established, the initial design of the robot is also the most difficult. This paper proposes two wireless remote control robots and a fully autonomous defensive robot design concept.
1. System composition
1.1 Remote control device
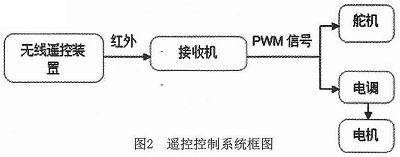
By using a WFT06X-A2.4GHz six-channel proportional wireless remote control device developed by Tiandifei to control the robot, when the handle on the remote control device is operated, the six-channel receiver can emit PWM signals with different duty cycles, thereby achieving external Connect to the control of subsequent devices.
1.2 Drive unit
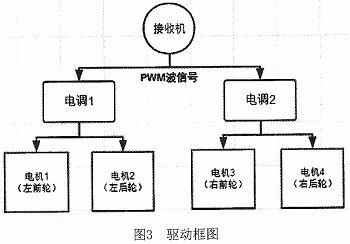
The robot is designed to be powered by a 12V, 25C power battery, using two 320A brushed ESCs to fully drive the four 12V front and rear four wheels. In addition, by adjusting the mixing switch of the remote control device, the receiver outputs the PWM wave control ESC that meets the required duty cycle, realizing the direct control of the motor speed and steering, and using the differential method to realize the short-time fast turning of the robot, and completing the round. The design of the drive of the robot.
1. 3 hitting device
For the A robot, choose to use the three-position non-pass solenoid valve to drive the attacking rod through the air pressure to effectively attack the enemy robot. After searching for relevant valid data and continually comparing, it was finally determined to use a 2.2-liter sealed Coke bottle as a gas storage device. If the PWM wave output by the receiver cannot directly control the solenoid valve, you can choose to use the analog servo to design a mechanical switch, directly supply power to the solenoid valve from the battery, and control the rise and fall of the analog steering gear arm through the remote control device. The control of the solenoid valve is turned on and off, so that the expansion and contraction of the attacking rod is flexibly controlled.
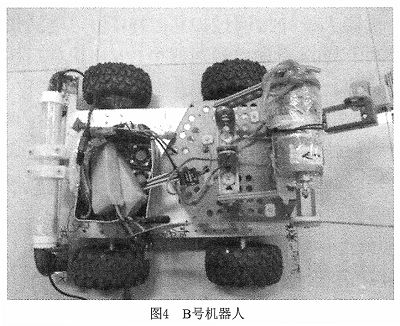
For the No. B robot, a 35 cm high platform was built on the underlying drive platform by using the engineering plastics provided by Borch Robotics, and the attack mechanism was designed on the platform. For this robot, we designed two attack mechanisms. First, a small robot is controlled by two 180° MG996R to design a set of pick-up devices. Before the start of the game, in order to meet the restrictions on the size of the robot in the rules, the robot is placed in a stowed state and placed on the previously built platform. Under the start of the game, quickly adjust the steering angle so that the robot is under the chassis. When the enemy robot meets us, it can directly reach the enemy robot chassis, then adjust the steering gear again and raise the enemy. The square robot makes it instantly lose its attack ability; the second (Fig. 4), through a small power DC motor, drives a long straight metal strip, constantly adjusting the motor speed and steering during the game, so that the metal strip rotates quickly against the enemy. The robot achieves an effective attack and can directly destroy its power supply system or blood strips.
2. Self-defense robot
The basic idea comes from the robots in the robotic martial arts competition. The robot is located on the “high ground†of the competition venue to protect our life tower. When the other robot enters our high ground, it immediately performs protective measures such as blocking and collision.
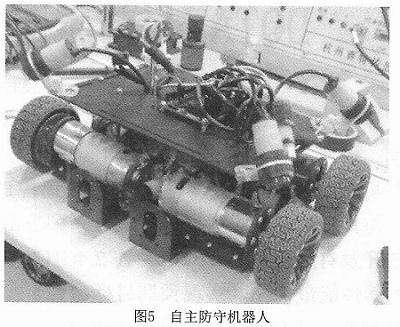
2.1 Drive and detection device
Four 37GB 60-555 motors are powered by 24V DC power supply, and infrared detection is realized by diffuse reflection type photoelectric switch. When the switch emits a beam, the target produces diffuse reflection, and the transmitter and receiver form a single standard component. When there is enough combination When the light returns to the receiver, the light-on state changes, and the change is fed back to the system main control board 80C51 single-chip microcomputer, according to the preset program to determine whether there is an enemy robot, the detection distance is continuously adjustable from 3 to 80 cm.
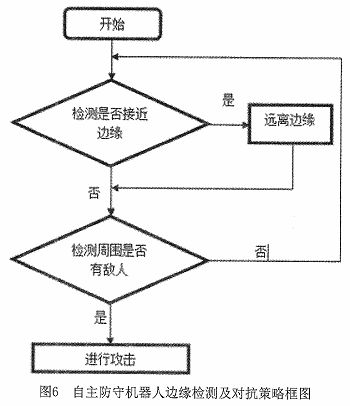
2.2 Confrontation strategy
According to the data returned by the photoelectric switch, the control panel makes a corresponding decision according to the preset program. By setting a marker, the edge detection and confrontation are at the same priority, and the edge detection part is not prioritized, so that the robot aggression is greatly improved to some extent. According to the rules of the game, there is a circle of “closed zone†surrounded by white rubber strips around our life tower. We set the gray level sensor on the bottom of the robot to continuously detect the gray level of the ground where the robot is located. When the white strip is detected. The time to retreat autonomously eliminates the concern of our robots to commit suicide attacks.
3. System implementation
During the game, the enemy robot and the enemy life tower were effectively attacked by the attack mechanism of the manual robot to obtain the score. The autonomous robot continuously patrols on our high and low levels, and performs attack, collision and other attacks on the enemy robots invading the high ground. Protect our life tower and form a relatively complete offensive and defensive system. The robots we developed in 2014 won the second prize in the Beijing Division and the third prize in the North China Division in the second DOTA competition of the second North China Robotics Competition.
4 Conclusion
Today, wireless full-automatic robots are widely used in various industries. Through the innovative design of different mechanisms of wireless remote-controlled robots, robots can accomplish many tasks that humans can't accomplish under human control. .
The two wireless remote control robots designed in this paper can basically fulfill the requirements of the robot DOTA competition, and attack the enemy robot to a certain extent, but there are still problems such as the robot is not fast enough, the impact is not enough, and the attack effect is not obvious enough. There is a lot of room for improvement in the material of the robot, the setting and driving of the attack mechanism. In the design of the wireless remote control robot in the future, a cylinder with better sealing can be used as the gas storage device, and the robot can be made of aluminum steel alloy. , to increase its own stability and anti-shock performance.
Guangzhou Ehang Electronic Co., Ltd. , https://www.ehangmobile.com